
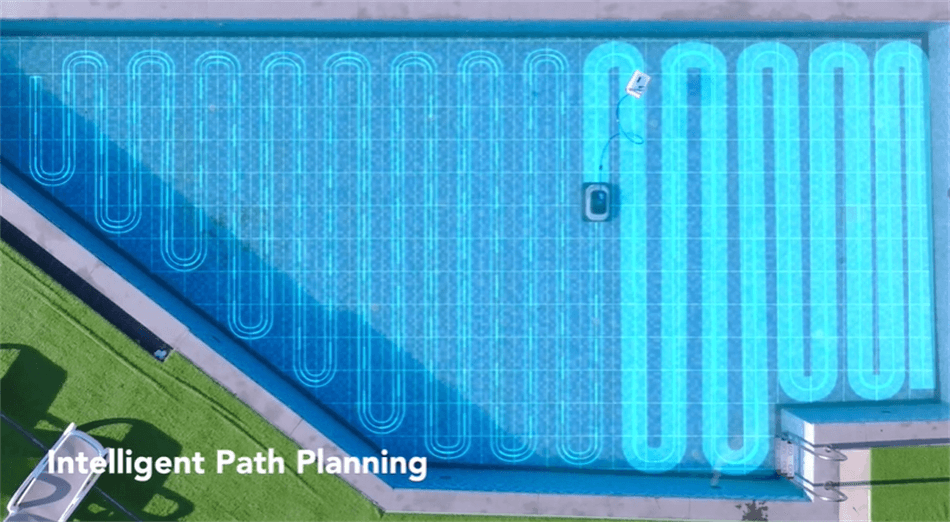
Ngophuhliso lwetekhnoloji yeerobhothi zenkonzo, iirobhothi zokucoca amadama okuqubha ngaphantsi kwamanzi zisetyenziswa ngokubanzi kwintengiso. Ukuze kuphunyezwe iindlela zabo zokucwangcisa ngokuzenzekelayo, zingabizi kwaye zilungelelaniseUluhlu lwe-ultrasonic ngaphantsi kwamanziabenzi boluvo bokuphepha imiqobo bayimfuneko.
EnkuluImarike
Ukuza kuthi ga ngoku, uMntla Melika useyeyona ntengiso inkulu kuphuhliso lwemakethi yephuli yehlabathi (iNgxelo yeMarike yeTechnavio, 2019-2024). Sele kukho ngaphezu kwe 10.7 million amadama okuqubha eUnited States, kwaye inani lamachibi amatsha, ingakumbi amachibi abucala, liyenyuka unyaka nonyaka, ngokunyuka kwe-117,000 ngo-2021. Umyinge wequla elinye labantu abangama-31. EFransi, imarike ye-pool yesibini ngobukhulu emhlabeni, inani lamachibi abucala lidlule kwi-3.2 yezigidi ngo-2022.Kwaye inani lamachibi amatsha lifikelele kwi-244,000 ngonyaka omnye, kunye ne-avareji yechibi enye kubantu bonke abangama-21.
Kwimarike yaseTshayina, elawulwa ngamadama okuqubha kawonke-wonke, umyinge wabantu abamalunga nama-43,000 babelana ngejimu yokuqubha (kukho amadama okuqubha angama-32,500 kweli lizwe, ngokusekelwe kubemi be-1.4 yezigidigidi).
ISpain inenani lesine eliphezulu lamadama okuqubha ehlabathini kunye nelesibini inani eliphezulu lamadama okuqubha eYurophu, kunye namadama okuqubha asisigidi esi-1.3 (ezokuhlala, zoluntu kunye neqela).
Ukusuka kwihlabathi--Uthelekiso lwemarike yerobhothi yepool yaseTshayina, ubungakanani bemakethi yaseTshayina ingaphantsi kwe-1% yehlabathi, imarike ephambili iseyiYurophu kunye neMelika. Idatha ibonisa ukuba ngo-2021, ubungakanani bemarike ye-robot ye-pool yehlabathi malunga ne-11.2 yezigidigidi zee-RMB, intengiso yeeyunithi ezingaphezu kwe-1.6 yezigidi, kuphela itshaneli ye-intanethi yase-United States. Ukuthunyelwa kweerobhothi zokucoca amadama okuqubha kuye kwafikelela ngaphezu kweeyunithi ezingama-500,000 ngo-2021.Kwaye izinga lokukhula kwazo lingaphezulu kwe-130%, belikwinqanaba lokuqala lokukhula ngokukhawuleza.
Okwangoku, imarike yokucoca i-pool isalawulwa kukucocwa ngesandla, kwaye kwimarike yokucoca idama lokuqubha yehlabathi, i-akhawunti yokucoca i-akhawunti ye-45%, ngelixa iirobhothi zokucoca ii-swimming pool zenza malunga ne-19%. Kwixesha elizayo, ngokunyuka kweendleko zabasebenzi kunye nokuthandwa kobuchwephesha boshishino olufana nombono obonakalayo, umbono we-ultrasonic, ukucwangciswa kwendlela ekrelekrele, i-Intanethi yezinto, i-SLAM (ukubekwa kwangoko kunye nobuchwepheshe bokwakha imephu) kunye nobunye ubuchwephesha obunxulumeneyo, iirobhothi zokucoca iidama zokuqubha. iya kutshintsha ngokuthe ngcembe ukusuka ekusebenzeni ukuya kwingqiqo, kwaye izinga lokungena kwiirobhothi zokucoca i-pool liya kuphuculwa ngakumbi.
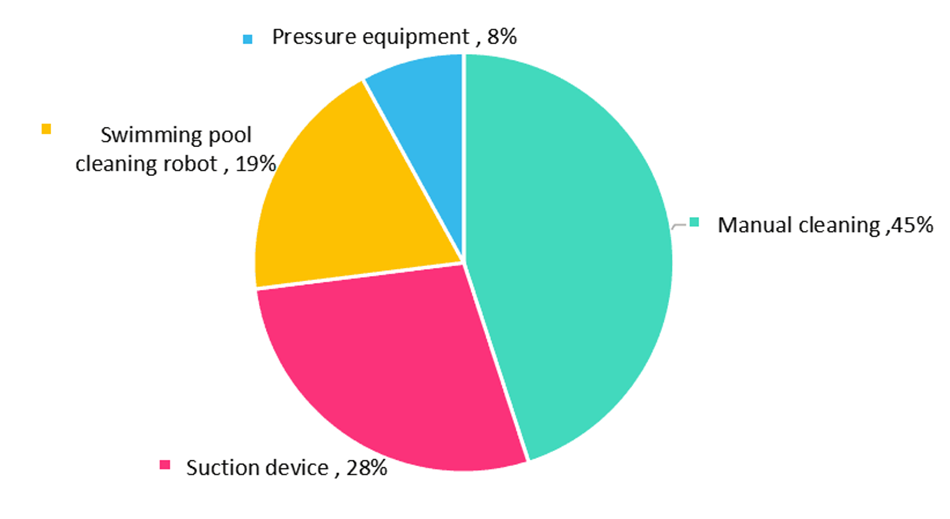
Iqondo lokungena kwimakethi yokungena kwimakethi yokuqubha yehlabathi ngo-2021
Uluvo oluzinikeleyo, izixhobo zoluvo eziphantsi kwamanzi zincedaukuqubhairobhothi yokucoca iphuli ukunqanda imiqobo ngobukrelekrele
I-Ultrasonic ephantsi kwamanzi yokulinganisa umgama wokuthintela umqobo luhlobo lwenzwa esetyenziswa kwirobhothi yokuthintela umqobo ongaphantsi kwamanzi. Inzwa isebenzisa iteknoloji yokulinganisa umgama we-ultrasonic ngaphantsi kwamanzi ukulinganisa umgama phakathi kwenzwa kunye nento elinganisiweyo. Xa inzwa ibona umqobo, umgama womqobo ubuyiselwa kwirobhothi, kwaye irobhothi inokumisa, ijike, icothe, ihambe eludongeni, inyuke eludongeni kunye neminye imisebenzi ngokwesalathiso esifakwe yi-sensor kunye nembuyekezo. ixabiso lomgama ukuqonda injongo yokucoca ngokuzenzekelayo i-swimming pool kunye nokuphepha umqobo.
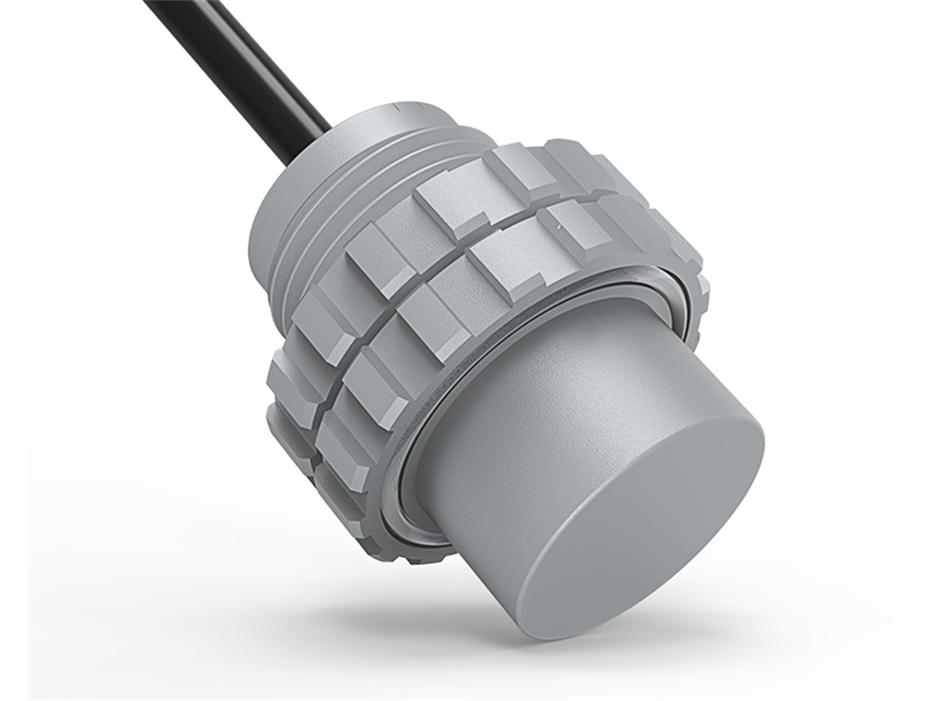
It uyezahapho—-L08 isivamvo esiphuma ngaphantsi kwamanzi
I-layout ekhangele phambili ye-sensor ye-DSP, uphando oluzimeleyo kunye nophuhliso lwe-sensor eziphantsi kwamanzi, ngokucwangciswa kwee-sensor zangaphantsi kwamanzi kwi-robot ephantsi kwamanzi, ukwenzela ukuba i-robot yokucoca i-swimming pool inomqobo wokucwangcisa umqobo wokucwangcisa umsebenzi.
I-L08-module yinzwa yokuthintela imiqobo engaphantsi kwamanzi e-ultrasonic eyenzelwe usetyenziso lwangaphantsi kwamanzi. Ineenzuzo zobukhulu obuncinci, indawo encinci eyimfama, ukuchaneka okuphezulu kunye nokusebenza kakuhle kwamanzi. Inkxaso ye-modbus protocol.Kukho uluhlu oluhlukeneyo, i-Angle kunye neendawo ezingaboniyo kwiimfuno ezahlukeneyo zabasebenzisi ukukhetha.
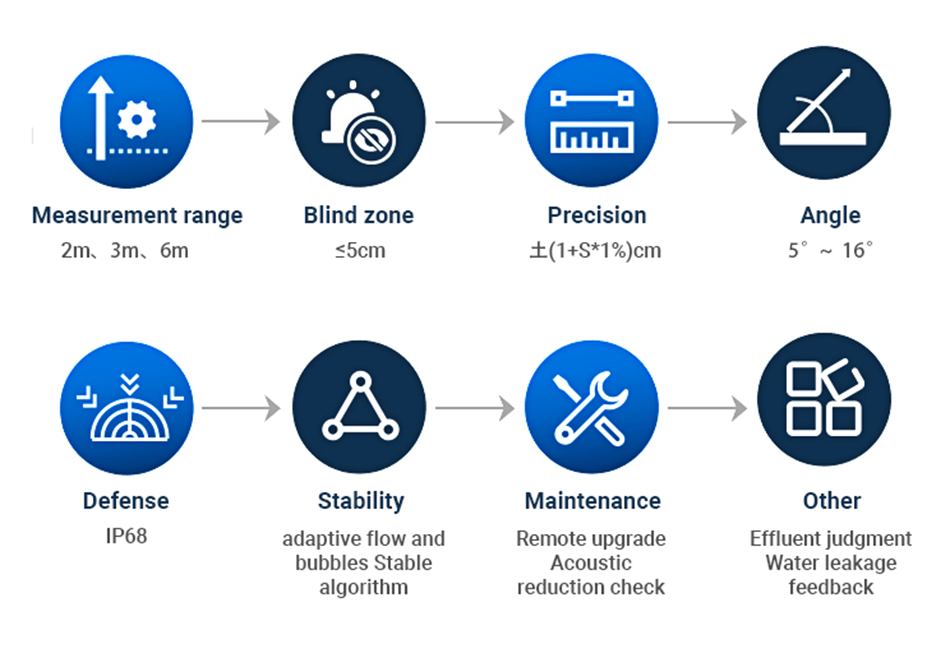
Iiparamitha ezisisiseko:
Jonga iindawo zentlungu, sungula izinto ezintsha kwaye ugqobhoze
Indlela yokuxhobisa ngcono i-robot yokucoca i-swimming pool ngokusebenzisa i-sensor ephantsi kwamanzi, kunye nokufezekisa impumelelo enokwenzeka yezobuchwepheshe, ukuhlanganiswa okupheleleyo kweenkonzo kunye nezisombululo.I-Dianyingpu igxininise kuphando kunye nophuhliso .Emva kophando olunzulu, sijonge iintlungu zemarike kwaye uqalise ukugqobhoza.
(1) ixabiso eliphezulu , akukho ndlela yokwandisa ukusetyenziswa kweemveliso zabathengi: izixhobo zokubona eziphantsi kwamanzi ezithengiswa ekhaya nakwamanye amazwe, ixabiso livela kumawaka e-yuan. ayisetyenziswa ngokubanzi okwangoku .
Idityaniswe neemfuno ezijoliswe kwiindleko zeerobhothi zabasebenzisi bangaphantsi kwamanzi, inkampani iphanda ngokuzimeleyo kwaye yaphuhlisa iiparamitha ezihambelana ne-transducer, indawo yezinto eziphambili, kunye namava okuvelisa ngobuninzi. Iindleko zancitshiswa ukuya ngaphantsi kwe-10% yoshishino, iphayona ukwamkelwa kwezinzwa zangaphantsi kwamanzi kwi-electronics yabathengi.
(2) Ukuhambelana kakubi kweeparameters zenzwa kwimarike: inzwa ikude, indawo eyimfama incinci, kwaye iiparameters ezihambelanayo ze-Angle azifumaneki kwimarike, ehlala ifuna indibaniselwano yeentlobo ezahlukeneyo zoluvo, kwaye ixabiso elidityanisiweyo liphezulu.
Kuphuhliswe i-dual-frequency multi-beam transducer, exazulula iiparamitha ezikumgangatho ophezulu womgama, indawo eyimfama kunye ne-angle.
①I-Angle ye-multi-beam isondele kwi-90 °, kwaye uluhlu lunokwanelisa ngaphezu kwe-6m, ukuhlangabezana nommandla ongaboniyo ngaphakathi kwe-5cm, kwaye ukuhambelana kweemeko zesicelo kuphezulu kakhulu.
② Eyona nto ingundoqo ye-sensor ye-ultrasonic yi-ceramic plate transducer, imveliso ithatha i-radial frequency kunye ne-frequency frequency ye-ceramic plate clever design scheme, emva koko ngokulungelelanisa kunye nokufumana ukulungiswa kwe-band-pass filtering, i-radial frequency resonance frequency. iphantsi, i-engile yokulinganisa inkulu, ubukhulu be-frequency resonance frequency iphezulu, ukungena kunamandla, umgama wokulinganisa ukude kwaye iiparamitha zommandla omncinci oyimfama zithathelwa ingqalelo.
(3) Kwimekobume entsonkothileyo ephantsi kwamanzi ayizinzile: xa kukho i-turbidity yamanzi, ukuhamba kwamanzi amakhulu, ingca ye-silt yamanzi angaphantsi kwamanzi, i-sensor data ayiphumelelanga, okubangela ukuba i-robot ingakwazi ukugweba umsebenzi ngengqiqo.
Ingxaki esetyenziswe kwindawo enzima yangaphantsi kwamanzi isonjululwa ngokudityaniswa kobuqili be-dual-frequency multi-beam kunye ne-algorithm eguquguqukayo kunye ne-Kalman filter processing. I-Superposition yeenzuzo zeefrikhwensi ezahlukeneyo, i-multi-beam drive intelligent drive, ulwahlulo lweendlela zokusebenza, amandla, i-engile, umgangatho wesignali unokuqhelana nokutshintsha kwendawo.
Ubume bemveliso kunye nenkqubo:
(1) Ulwakhiwo lulula ngenkangeleko, luncinci ngobukhulu, ufakelo lufuna kuphela ukubeka umngxuma ocetyiswayo kwiqokobhe ukuqinisa i-nut, eqhagamshelwe idatha yemveliso yesiqhelo yesixhobo emele ufakelo lugqityiwe; Ukugcinwa kamva kufuneka kuphela ukuvula i-nut ukususa inzwa, ukusebenza okulula, ukunciphisa iindleko zokufunda zokufakela kunye nokugcinwa.
(2) inkqubo yemveliso, i-transducer isebenzisa itekhnoloji yonxibelelwano olungeyonxibelelwano, ivaliwe isakhiwo esidibeneyo. Kwaye umatshini wonke uthatha uyilo olungenathuli kunye nolungenamanzi. Isekethe yangaphakathi isebenzisa i-potting epoxy resin glue yokhuseleko olusongelwe ngokupheleleyo, umphumo ongenamanzi unokufikelela kwinqanaba le-IP68.
Uphandoiezizimeleyolykwayeumsebenzi othembekileyo
Kwinkqubo yokuphuhliswa kwenzwa, iqela le-R & D liphucula ngokuphindaphindiweyo kwaye liphindaphinda iiparitha ze-multidimensional ezifana nokuzinza kwedatha, impembelelo yokuhamba kwamanzi, i-frequency and manufacturability. Kwaye kuqhutywe iimvavanyo ezininzi ezidibeneyo ngokusondeleyo kunye neemeko zokusebenza zangempela zerobhothi yokucoca i-pool ukuze kuphuculwe ngakumbi ukulungelelaniswa kwenzwa kwindalo kunye neemeko zokusebenza.
Kwangaxeshanye, iDianyingpu ibisoloko igcina ukoyikeka kobuchwephesha, inzwa ephantsi kwamanzi njengenxalenye yokulinganisa, xa kuthelekiswa noyilo kunye nokulungiswa kweempazamo, imveliso kunye nokulinganisa kubaluleke kakhulu, iphuhliswe ngolungelelwano iseti epheleleyo yovavanyo lwangaphantsi kwamanzi olusukela kunye nenkqubo yokulinganisa.
Ngokusekwe kuvavanyo kunye nenkqubo yokulinganisa, inzwa yenze uvavanyo lokuthembeka olunje ngobushushu obuphezulu kunye nokugcinwa kokufuma okuphezulu, uvavanyo lokutshisa kunye nokubandayo, uvavanyo lokutshiza ityuwa, uvavanyo lokuguga olukhawulezileyo lwe-UV, uvavanyo lokulahla ze, uvavanyo lokuntywiliselwa kolwelo (olulinganisiweyo lovavanyo lokugqwala kwamanzi) , uvavanyo lwe-vacuum olungenamanzi, oluqhutyelwa kwi-prototype iteration nganye.
Emva kokuba i-sensor idibaniswe nomzimba we-robot, ukusebenza kwawo wonke umatshini kuvavanywa amawaka eeyure ngokudibanisa neyona ndawo isebenzayo yerobhothi. Imveliso yale sensor kwimveliso yobuninzi ingaphezulu kwe-99%, eye yaqinisekiswa yinkqubo yemarike yokuvelisa ibhetshi.
Iqokelelwe, i-L08 iya kuqhubekahlaziya
Ukuphonononga indlela yophuhliso ye-sensor eziphantsi kwamanzi: uphando, ukudibanisa, ukusungula izinto ezintsha, ukuqinisekiswa. Indawo nganye yintshatsheli ekhaliphileyo, ukukhangela nzima, kunye nokuqokelela okutyebileyo kwamandla kwicandelo letekhnoloji. I-L08 yimveliso yokuqala yenkampani ephantsi kwamanzi ye-ultrasonic esusela kwisicelo. Inkampani iya kusungula iimveliso ezininzi ezisekwe kwirobhothi engaphantsi kwamanzi ukuphepha umqobo kunye nokuhlola ubunzulu.
Kwixesha elizayo, ngokukhuthazwa kweerobhothi zangaphantsi kwamanzi, i-sensor eziphantsi kwamanzi njengenkxaso engundoqo yokuqonda iirobhothi eziphantsi kwamanzi, ngokuqinisekileyo ziya kuzisa utshintsho olukhulu kwishishini leerobhothi ezingaphantsi kwamanzi kunye nentsimi.
Ixesha lokuposa: Aug-04-2023